
DIY Awtomatikong Tagapakain ng Pusa
Pamilyar ang mga may-ari ng pusa sa problema kung paano pakainin ang kanilang mga alagang hayop kapag naiiwan silang mag-isa sa bahay. Ang pinakamahusay na solusyon ay ang pag-install ng automatic feeder. Kung hindi mo kayang bumili ng yari nang aparato, maaari kang gumawa ng sarili mo. Para mapadali ang gawain, nag-aalok kami ng dalawang madaling gawin na opsyon.

Nilalaman
Awtomatikong tagapagpakain na may mekanismo ng orasan
Hindi mahirap gumawa ng sarili mong awtomatikong lalagyan ng pagkain para sa pusa. Ang kailangan mo lang gawin ay kunin ang mga kinakailangang materyales at maglaan ng isang gabi para isakatuparan ang iyong ideya.
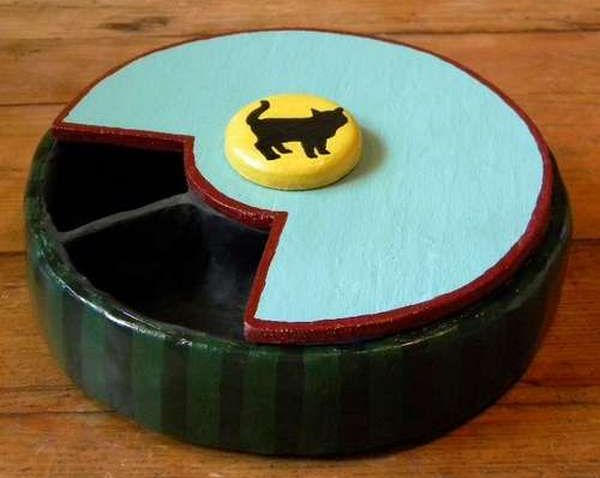
Ang awtomatikong tagapagpakain na ito ay isang mangkok na nahahati sa apat na kompartamento. Ang takip na may ginupit na bahagi ay bumubukas kada tatlong oras upang ipakita ang isa sa mga kompartamento. Ang takip ay umiikot gamit ang mekanismo ng quartz clock. Ang mekanismo ng quartz clock, na kinuha mula sa isang alarm clock, ay maginhawa para sa layuning ito. Gayunpaman, dahil idinisenyo ito upang mapaglabanan ang kaunting karga na nalilikha ng halos walang bigat na mga kamay ng isang orasan, mahalagang tiyakin na ang disc ay umiikot nang walang friction o jamming kapag ginagamit ito upang paikutin ang takip.
Para makagawa ng bird feeder, kakailanganin mo ang mga sumusunod:
- kahon na lata na may naaalis na takip;
- mekanismo ng relo na kuwarts;
- mga kamay ng oras at segundo;
- plastik o plywood blangko para sa rotary disk;
- luwad para sa pag-ukit ng mga panloob na selula;
- 2 clove;
- mga nipper.
Una, tanggalin ang mekanismo ng orasan. Sa gitnang bahagi nito ay may dalawang puting plastik na tubo, ang isa ay nasa loob ng isa pa. Ito ang mga baras para sa mga kamay ng minuto at oras. Isang gitnang metal na baras ang nagtutulak sa kamay ng segundo.

Para gawin ang katawan ng tagapagpakain, markahan ang isang lata na may taas na 35 mm. Gupitin ang ibabaw ng lalagyan gamit ang mga wire cutter. Para matanggal ang matutulis na gilid, takpan ang mga pinutol na gilid at ang mga panlabas na gilid ng tagapagpakain gamit ang mga piraso ng luwad. Ihurno ang mangkok sa oven.


Isang base na kahoy ang pinuputol ayon sa laki ng mekanismo. Inaayos ang kapal ng base upang ang mga puting baras ay nakausli nang 1-2 mm sa ibabaw, habang ang katawan ng mekanismo ay nananatili sa ilalim ng mga dingding.

Ang luwad ay ginagamit upang bumuo ng mga panloob na partisyon at hulmahin ang isang kompartimento upang paglagyan ng mekanismo ng orasan. Ang mekanismo ay dapat na madaling magkasya sa gitnang kompartimento. Kung kinakailangan, ang hugis ng kompartimento ay maaaring baguhin habang ang luwad ay malambot pa.


Para mapalakas ang kamay ng orasan, balutin ito ng 2-3 patong ng tape. Kung ang kamay ay nakausli lampas sa kompartimento, gupitin ito gamit ang mga wire cutter.

Ang mekanismo ay ipinasok sa kompartamento, na sinigurado gamit ang mga piraso ng malambot na alambre. Ang isang kamay ay nakakabit sa tuktok ng mekanismo.

Isang umiikot na disk ang pinutol mula sa plastik o manipis na plywood. Isang-kapat ng disk ang pinutol palayo sa gitna, 30-40 mm ang layo mula sa pangunahing kompartimento. Isang butas ang binubutasan sa gitna, na nakahanay sa lokasyon ng panlabas na puting tubo ng mekanismo ng orasan.

Dalawang pako ang itinutusok sa gitna ng disk, na nagpapahintulot sa kamay ng oras na magkasya sa pagitan nila. Ang mga pako ay dapat sapat ang haba upang ang kanilang mga dulo ay hindi dumampi sa katawan ng aparato.


Ang metal na baras na humahawak sa kamay ng segundo ay tinatanggal mula sa mekanismo. Ito ay pinaikli, na ginagawang magkapareho ang haba ng mga dulo, at pagkatapos ay muling ikinakabit sa baras.

Isang takip na may diyametrong 50-60 mm ang pinutol mula sa plywood. Isang aspili na may palaso ang ikinakabit sa ilalim ng takip gamit ang tape. Ang naka-assemble na takip ay inilalagay sa permanenteng lokasyon nito.

Handa na ang awtomatikong tagapagpakain. Ang natitira na lang ay subukan ang sistema at palamutian ang aparato ayon sa iyong kagustuhan.
Awtomatikong tagapagpakain na may servo motor
Ang isang nakatigil na awtomatikong tagapagpakain ay isang mas kumplikadong disenyo. Ang konstruksyon nito ay pinakamahusay na gagawin ng mga pamilyar sa elektronikong kagamitan.

Maginhawa ang modelong ito dahil mayroon itong maluwag na kompartimento. Madali itong maglaman ng hanggang 4 kg ng pagkain, higit pa sa sapat para sa dalawang linggong pagpapakain.
Para makagawa ng bird feeder, kakailanganin mo ang mga sumusunod:
- mga sheet na gawa sa kahoy o plywood;
- mga blangko na salamin o plastik;
- mga kagamitan para sa paggawa ng kahoy.
Ang yunit ay patatakbuhin ng mga linear actuator, na ia-activate ng isang control unit. Ang servo motor ay maaaring magsilbing motor. Maaari itong bilhin sa komersyo o gawin mula sa mga scrap materials.
Ang isang halimbawa ng pag-assemble ng isang simpleng motor mula sa mga scrap material ay ipinapakita sa video instruction sa ibaba:
Sa aming kaso, naka-install ang modelong Micro Servo Towerpro SG90 9g.
Para makontrol ang mga motor at makapagtakda ng mga agwat ng oras, kakailanganin mo rin ng microcontroller. Ginagamit ng halimbawang ito ang pinakasimpleng Arduino microcontroller. Ang abot-kayang modelong ito ay may mababang konsumo ng kuryente at ipinagmamalaki ang mahusay na pagganap, kaya mainam ito para sa ganitong uri ng gawain. Kakailanganin mo rin ng mga pin para ikonekta ang board sa servo motor at isang 5V USB charger.
Para ma-program ang feeder para magbukas, sa pamamagitan ng pagtatakda ng 24-oras na pagitan sa pagitan ng mga pagpapakain, isulat ang sumusunod na code para sa Arduino:
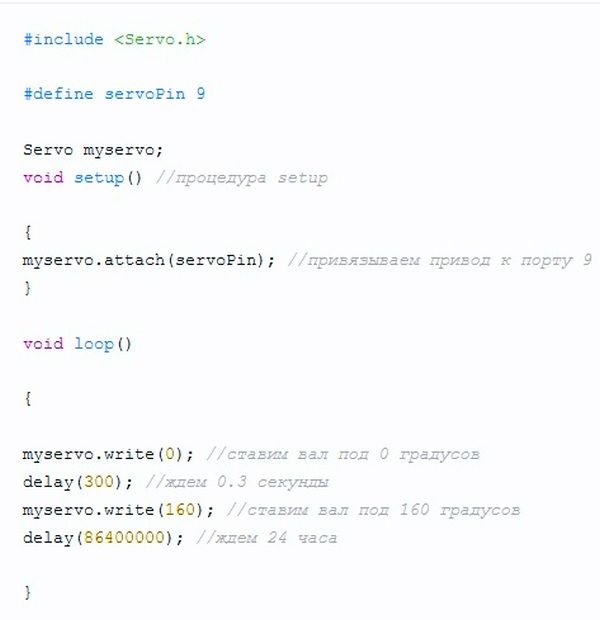
Ang unang hakbang ay ang pagbubuo ng istrukturang kahoy. Ito ay gawa sa mga tabla na 80 cm ang haba at 60 cm ang haba, at bawat isa ay 10 cm ang lapad. Ang istraktura ay huhubugin na parang isang kahon, na nakatayo nang tuwid gamit ang mga paa. Ang likod ng kahon ay nababalutan ng plywood, at ang harap ay nababalutan ng malinaw na plastik.

Dalawang food guide strips ang ipinako sa ilalim ng kahon sa anggulong 45°. Ang mga dulo sa ibaba ng mga ito ay nakapatong sa dalawang sliding board na pinagdikit. Bahagyang tinatakpan ng parihabang ito ang butas na binutas sa ilalim na board. Ang diyametro ng butas ay dapat na bahagyang mas maliit kaysa sa mangkok ng pusa.

Simple lang ang prinsipyo ng pagpapatakbo ng aparato: sa mga pagitang itinakda ng isang microcontroller, ang isang parihaba na binubuo ng magkakaparehong laki ng mga tabla na pinagdikit-dikit ay umuusad patagilid. Sa sandaling ito, ang isang butas na binutas sa loob nito ay nakahanay sa isang butas sa dingding ng kahon. Bilang resulta, ang isang bahagi ng pagkain ay natatapon sa isang mangkok na nakalagay sa ilalim.
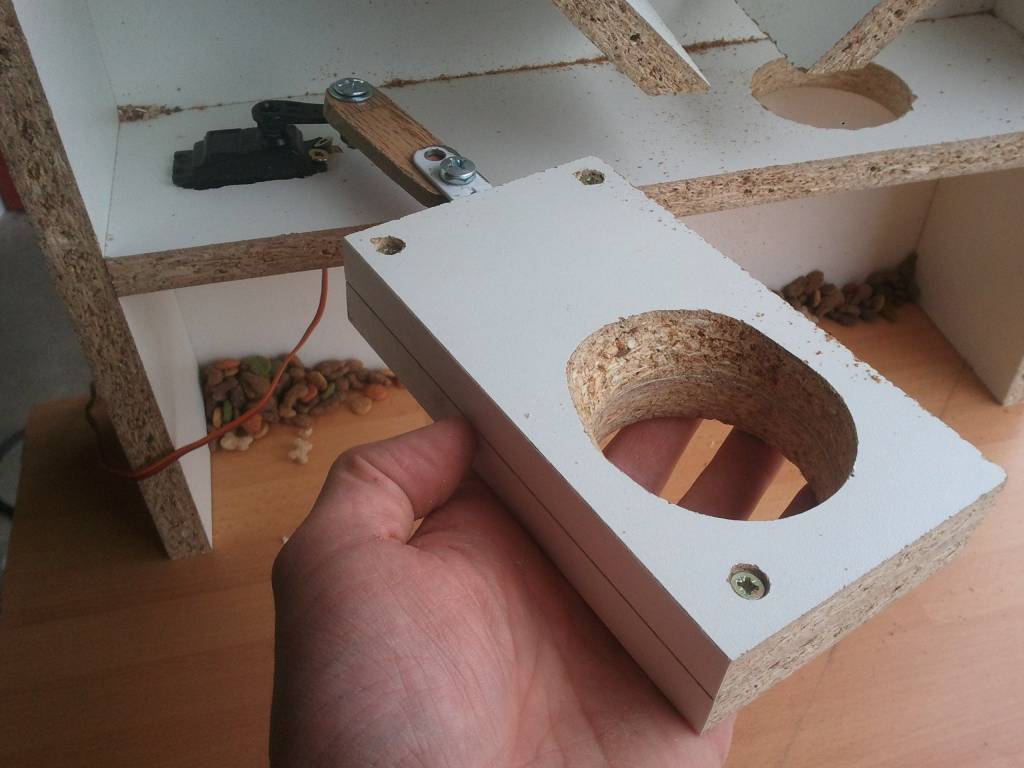
Upang maigalaw ang istraktura, isang bloke na may butas ang ikinakabit sa ilalim na bar gamit ang mga naaalis na kawing.
Sa ibabang kaliwang sulok ng binuong istraktura, isang butas ang ginawa upang pahintulutan ang mekanismo na konektado sa makina.

Ang servo motor at microcontroller ay konektado sa circuit gamit ang mga wire. Ang board ay pinapagana nang direkta mula sa mains, na konektado sa isang 5V USB charger. Pagkatapos ay sinusubok ang functionality ng system.
Kung gumagana nang maayos ang mekanismo, ang natitira na lang ay punuin ang tagapagpakain ng pagkain at anyayahan ang iyong alagang hayop na may apat na paa na tikman ang pagkain.
Batay sa inilarawang disenyo, maaaring bumuo ng isang sistema ng pagpapakain na may bahagyang kakaibang prinsipyo ng pagpapatakbo. Sa kasong ito, ang katawan ng tagapagpakain ay gawa sa mga acrylic sheet, at ang umiikot na dispenser ay gawa sa mga itinapong CD.
Narito ang isang video tutorial kung paano gumawa ng katulad na awtomatikong pagpapakain ng pusa gamit ang iyong sariling mga kamay:
Basahin din:
- DIY na kwelyo ng pusa
- Gulong para sa Pagtakbo ng Pusa gamit ang Iyong Sariling Kamay
- DIY na komplikadong paglalaro ng pusa






Magdagdag ng komento